In this article
Help us make these docs great!
All rapyuta.io docs are open source. See something that's wrong or unclear? Submit a pull request.
Make a contributionOctober
October 27
Welcome to the October 27, 2021 release of the rapyuta.io platform.
Features
- You can now customize the data to be viewed on the ROS Bags Jobs tab by using the following options:
- Sorting - select a field and click the sort icon to sort data in ascending or descending order.
- Filtering - select a field, click the filter icon and select one of the filtering options to view data. Additionally, you could also use the search option to filter data.
- Pagination - optimize your page load-time by specifying the number of entries to be viewed per page.
- Support for mounting subpaths of a volume at different mount paths. For example, on the deploy page modal, if you add a volume with details as shown below.
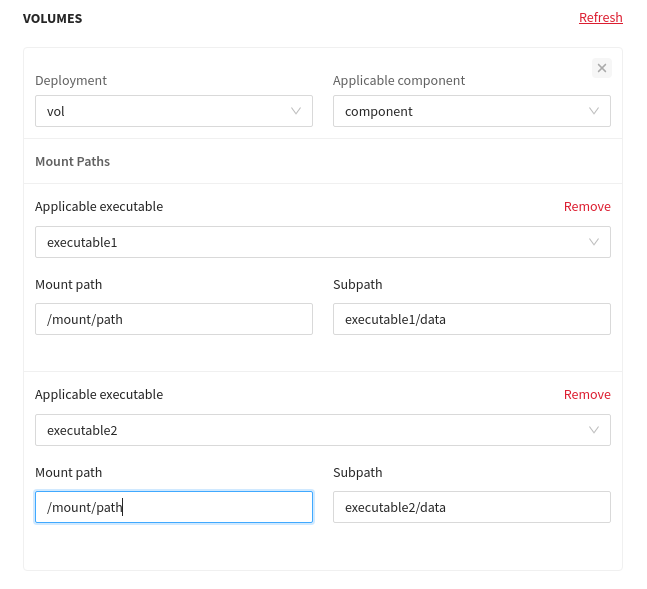
This will mount:executable1/datadirectory of volume, to/mount/pathofexecutable1executable2/datadirectory of volume, to/mount/pathofexecutable2
- While uploading a ROS bag if the device goes offline, the upload fails and the Status changes to Error. You can now use the retry option under Actions to resume ROS bag uploads.
SDK
rapyuta.io Python SDK 0.35.0 released.
- Support for mounting subpaths of a volume at different mount paths.