In this article
Help us make these docs great!
All rapyuta.io docs are open source. See something that's wrong or unclear? Submit a pull request.
Make a contributionROS Publisher Subscriber (Native)
A ROS publisher is part of a ROS package. It is a public git repository, which is built into a running docker container on the fly when the package is being deployed. A ROS subscriber is also a part of the same ROS package.
Learning objectives
The tutorial will show you how to deploy and establish a communication in a basic ROS package with a ROS publisher and ROS subscriber components running on the cloud by using a native network.
Prerequisites
- Ensure that the Google Chrome browser is installed on the computer.
- You should be familiar with the below tools:
- Git
- UNIX/LINUX command terminal
- ROS topics
- ROS services
Estimated time
12 minutes
Creating the Package
To create the native publisher subscriber package using the console, follow the steps:
- On the left navigation bar, click Development > Packages.
- Click ADD NEW PACKAGE.
- In the Package Name box, type in a name for the package say
Native publisher subscriber - In the Package Version box, enter the version of the package you are creating. The default value is 1.0.0
- Ensure that Is a bindable package is selected.
- In the Description box, provide a summary of the package.
- Click NEXT.
The package has two components: the talker and listener running on the cloud.
- Talker component (aka ROS publisher)
-
In the Component Name box, enter a name for the component, say
talker
The name of a component must consist of alphabets [A-Z, a-z], digits [0-9], hyphen - and an underscore _ character. It must not begin with a digit.
-
For Component Runtime, click Cloud.
-
Ensure Is ROS Component is selected.
-
Ensure the ROS Version is Melodic.
-
Set the value of Replicas to run the component to the number 1 (default value).
-
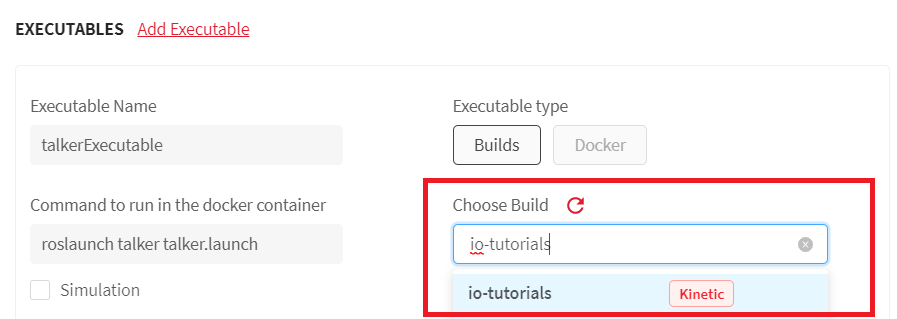
In the Executable Name box, enter a name for the executable say
talkerExecutable
The name of an executable must consist of alphabets [A-Z, a-z], digits[0-9], hyphen - and an underscore _ character, and must not start with a digit.
-
For the Docker Image value, enter:
quay.io/rapyuta/io_tutorials. -
In the Command to run in the docker container box, enter the command:
roslaunch talker talker.launchEnsure you always execute the command roslaunch to explicitly start the ROS Master instead of running the rosrun command, because the ROS Master will fail to start on rosrun, and eventually, the deployment will fail as well.
-
The talkerExecutable publishes a ROS topic,
/telemetryTo add a ROS topic, click Add ROS topic. In the Name box, enter the name of the ROS topic. Select Maximum for QoS.
-
- Listener component (aka ROS subscriber)
-
In the Component Name box, type in a name for the component, say
listenerThe name of a component must consist of alphabets [A-Z, a-z], digits [0-9], hyphen - and an underscore _ character, and must not begin with a digit.
-
For Component Runtime, click Cloud.
-
Ensure Is ROS Component is selected.
-
Ensure the ROS Version is Melodic.
-
In the Executable Name box, type in a name for the executable, for example,
listenerExecutableThe name of an executable must consist of alphabets [A-Z, a-z], digits [0-9], hyphen - and an underscore _ character, and must not begin with a digit.
-
For the Docker Image value, enter:
quay.io/rapyuta/io_tutorials. -
In the Command to run in the docker container box, enter the command:
roslaunch listener listener.launchEnsure you always execute the command roslaunch to explicitly start the ROS Master instead of running the rosrun command, because the ROS Master will fail to start on rosrun, and eventually, the deployment will fail as well.
-
Click NEXT > CONFIRM PACKAGE CREATION.
-
Create a Native Network
If you have already created a native network, you can skip this procedure. For more information about native network, click here
Perform the following procedure to create a native network.
-
On the left navigation bar, click Networking>Networks.
-
Click ADD NETWORK and select the network type as Native Network.
-
In the Create new native network dialog-box, enter
cloud_native_network1as the name for the native network. -
Select ROS Distro as Melodic.
-
Select the Runtime as Cloud.
-
From the Resource limit field, select the memory allocation and computational ability of the routed network. These resources are reserved in the platform for effective ROS communication. For this tutorial, you can select Small: 1cpu core, 4 GiB memory as the resource limit.
-
Click CONTINUE and wait for the native network to be successfully running.
Deploying the package
To deploy a package using the console, follow the steps:
- On the left navigation bar, click Development>Catalog.
- Select the
native publisher subscriberpackage. - Click Deploy package.
- In the Name of deployment box, enter a name for the deployment you are
creating say
Native Publisher Subscriber Deployment. - Click on Native NETWORK > Add, select the native network,
cloud_native_network1, from the drop-down list. - Click CREATE DEPLOYMENT > Confirm.
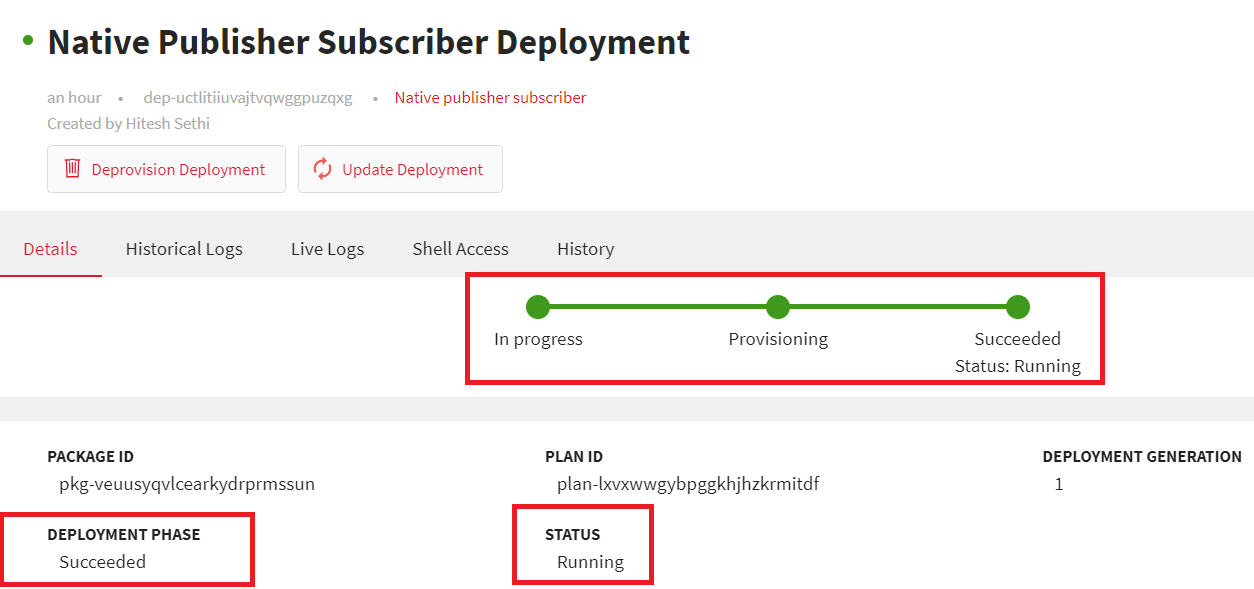
You will be redirected to the newly created deployment’s Details page where a green colored bar moves from In progress to Succeeded with Status:Running indicating that the DEPLOYMENT PHASE has Succeeded, and the STATUS is Running.
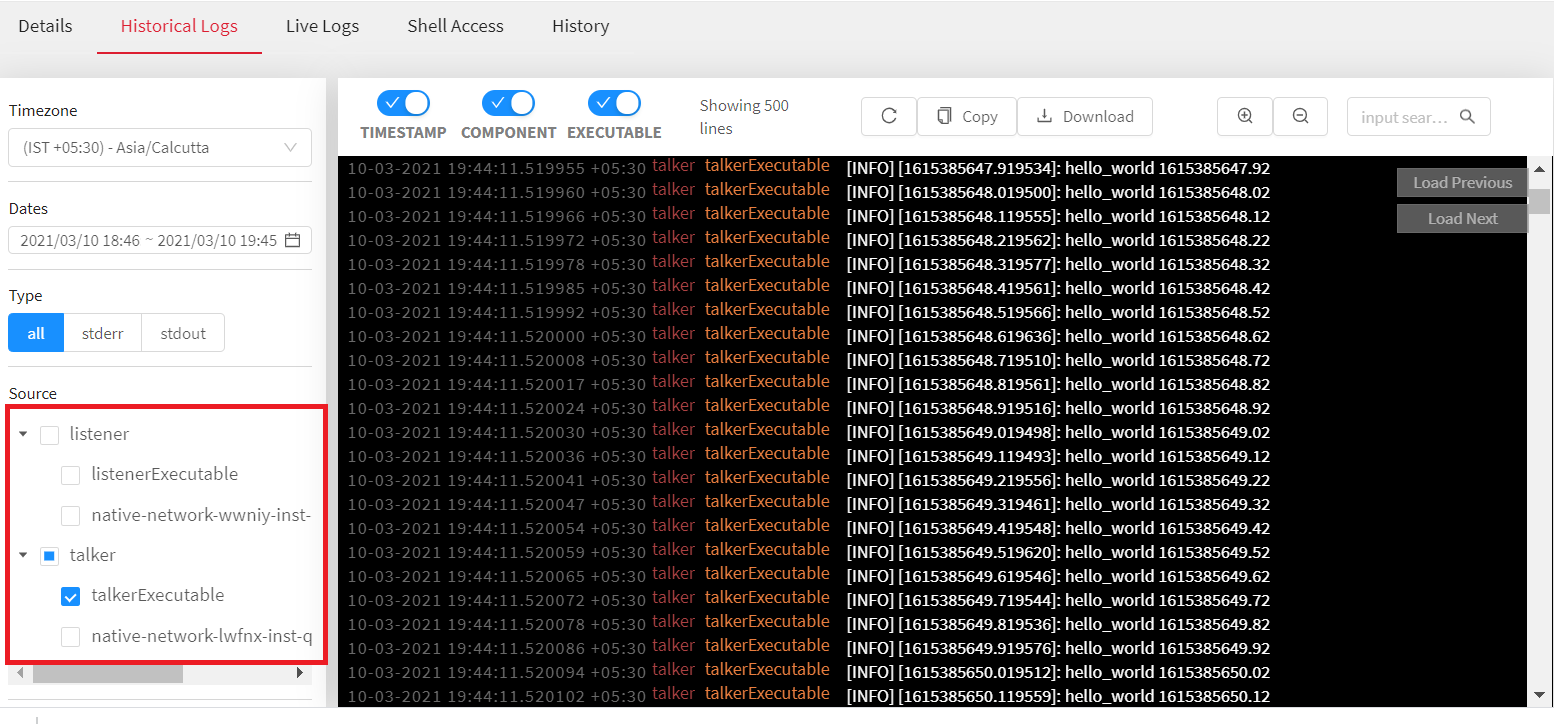
You may also analyze the corresponding deployment logs to check if everything is working OK.
The listener-listenerExecutable will be streaming /listener I heard hello_world logs.
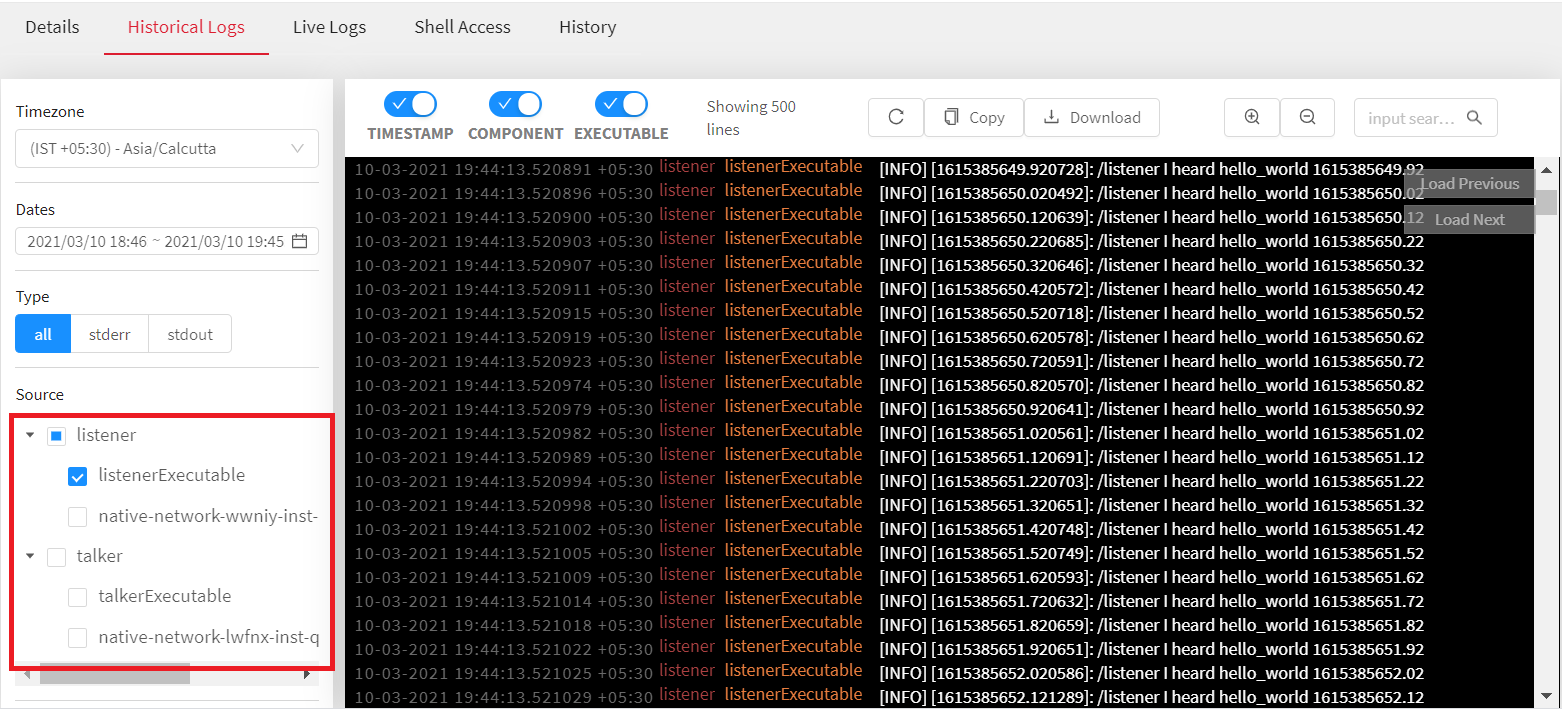
while talker-talkerExecutable will be publishing hello_world logs.