In this article
Help us make these docs great!
All rapyuta.io docs are open source. See something that's wrong or unclear? Submit a pull request.
Make a contributionConfiguration Variables
Device configuration variables are environment variables that allow you to correctly configure a device on rapyuta.io using the console. They are used when deploying packages on the device.
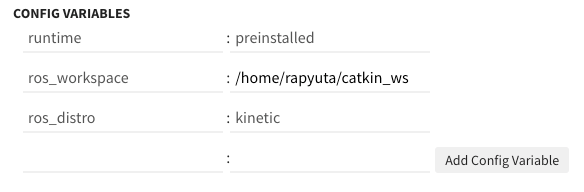
A list of predefined device configuration variables is available for a newly added device. They are:
- ros_distro specifies the ROS distribution found on the device. It is automatically detected when the device is provisioned. It is immutable as the device determines its value. It is a mandatory configuration variable when deploying ROS packages. It is usually assigned kinetic or melodic value depending on the version of ROS installed on the device.
- ros_workspace is the absolute path of the default catkin workspace on the device. rapyuta.io automatically sources ROS packages present in this workspace for package deployment.
- runtime specifies whether the device supports dockercompose for the package deployment. Otherwise, its value is set as preinstalled. It is immutable. You can provide this value while adding a device to rapyuta.io
The Details page of each device contains the above pre-defined configuration variables.
To create additional device configuration variables, such as ros_package_path, click Add Config Variable.
You can override the predefined value of a device configuration variable while creating a package deployment. For instance, you may change ros_workspace when deploying a package for a ROS-based device.
You can deselect device configuration variables that you do not need during deployment. However, remember that ros_distro is mandatory when deploying a ROS package.
For docker runtime, the rapyuta.io platform maintains 1 GB of disk usage for the ROS master logs. If the disk usage exceeds the default limit of 1 GB, the platform purges the older logs to maintain the default limit. If you want to customize the disk size for the ROS master logs, you can add a configuration variable rosmaster_log_retention_size_mb with the desired disk size.
If you customize the disk size for ROS master logs, the new size is considered after next device reboot.
Batch Logging Configuration
The size and rotation logic of the backup file is governed by the following configurations.
- Backup Directory: Specify the backup directory in the device to store the log files.
- Rotation size: Specify the log file size in MB after which the file is rotated.
- Rotation interval : Specify the time interval after which the log files are rotated. The available time intervals are 1hr, 12hr, 24hr, 48hr, and 72hr.
- Rotated Archive Limit: Specify the total number of rotations to be stored in platform. The available rotated archive limits are 5, 10, 15, 20, 25, 30.
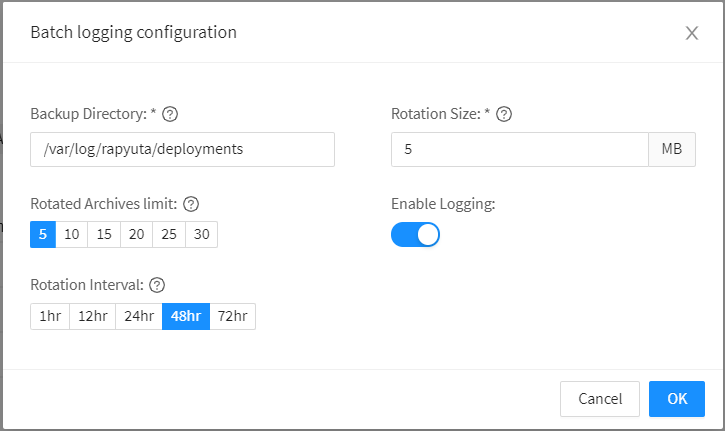
A rotation is completed after the specified rotation size or interval is reached.