In this article
Help us make these docs great!
All rapyuta.io docs are open source. See something that's wrong or unclear? Submit a pull request.
Make a contributionROS Routed Networks
A routed network allows you to communicate between different ROS environments as described in the following scenarios.
- ROS environments that are deployed in the cloud.
- ROS environments that are deployed in the device (can be in same or different networks)
- A combination of both
In latency sensitive applications, when all the ROS environments are in (For example, in case of simulation), it is advised to use native network. For more information, click here.
In case of routed network, the rapyuta.io platform relies on a sub-component called the cloud bridge for implicitly establishing a communication channel between two or more ROS environments. It is an application-level bridge that offers many compelling features to ROS developers including augmented ROS over the public internet and dedicated features for dynamic multi-robot ROS communication.
Use Case
For the use case, let’s take an example of 3 ROS packages:
- package_A and package_B are deployed in two different devices at different warehouses and package_C is deployed in the cloud.
We want to establish a communication between 3 different ROS packages publishing and subscribing to each other. To overcome the heterogeneous infrastructure of networks between different packages, we can create a cloud routed network, for example, cloud_network_1, and use it at the time of deployments of each package as described in the following.
- Deploy package_A binding to the cloud routed network, cloud_network_1, as deployment_A.
- Deploy package_B binding to the cloud routed network, cloud_network_1, as deployment_B.
- Deploy package_C binding to the cloud routed network, cloud_network_1, as deployment_C.
The result is as follows
- We have established a communication between the packages deployed at different locations with a heterogeneous network.
Pros
- Communication between different ROS environment in heterogenious network is possible as each ROS environment has its own cloud bridge that connects to the cloud routed network for communication.
- Augmented ROS communication over the public internet and dedicated features for dynamic multi-robot ROS communication.
Cons
- The cloud routed network doesn’t serve well in latency-sensitive communications.
Cloud Routed Network
When a user deploys a routed network to the cloud it is considered a cloud routed network. Any compute resources (CPU/memory) consumed by this routed network deployment count against your cloud deployment hours quota.
Package deployments in the cloud OR device can connect to a cloud routed network.
Resource Limit
When creating a cloud routed network, the Resource limit field defines the memory allocation and computational capability of the routed network. These resources are reserved in the platform for effective ROS communication. You can choose the resource limit of a routed network based on the following requirements.
- size of ROS messages
- frequency of ROS messages
- number of topics/services/actions
- QOS of ROS message
- number of publishers/subscribers that will be active under a particular routed network
Device Routed Network
In certain cases where communication is latency-sensitive or has high throughput, the user can choose to deploy a routed network to a device. While avoiding a round trip of information to the cloud minimizes latency and allows for better throughput ONLY deployments on devices on the same local area network can bind to it.
Routed networks can be deployed to a device with the following parameters:
- Device: Any online device with docker runtime and AMD64 architecture
- Device IP Interface: network interface (i.e., an IP address) that will be used by other deployments for communication to this routed network.
- Restart policy: Kindly refer to the restart policy.
On reboot, devices configured using DHCP may boot up with a new IP address and the network configuration of a deployed routed network becomes invalid. This can be avoided by assigning a static IP to the device you intend to deploy a routed network to esp in production systems.
Use Case
For the use case, let’s take an example of 3 ROS packages:
- package_A, package_B, and package_C are deployed in 3 devices respectively in a warehouse sharing the same local area network.
We want to establish a communication between these 3 ROS packages. You can use a device routed network and use it at the time of deployments of each package as described in the following.
- Deploy package_A binding to the device routed network, device_network_1, as deployment_A.
- Deploy package_B binding to the device routed network, device_network_1, as deployment_B.
- Deploy package_C binding to the device routed network, device_network_1, as deployment_C.
The result is as follows
- We have established a communication between the packages in the same routed network.
We can achieve the communication by using a cloud routed network. However, using a cloud routed network might cause a latency in the communication even if the devices are sharing the same local area network.
Pros
- Creates a low-latency communication as there is no need of a roundtrip of communication through cloud.
Cons
- Communication through a device routed network is only possible for the ROS environments sharing the same local area network and the packages deployed in the devices.
ROS2 Routed Network Internal
ROS2 Routed Network internally uses eProsima DDS Router for communication. DDS Router runs a FastDDS discovery server for peer-to-peer communication between cloud deployments and routers. The router runs in repeater mode so that multiple devices can communicate with each other from one local network to another local network at a different geographic location.
ServerID - The DDS Router runs discovery server on the Server ID. By default, the ServerID is set to 0. ServerPort - The DDS Router runs discovery server on the Server Port. By default, ServerPort is set to 11811.
DomainID - DDS Router Client uses device components DomainID to ensure it only listens to the ros2 nodes running on this DomainID. It also sets environment variable ROS_DOMAIN_ID in the user executables. We may override it by explicitly setting the environment variable ROS_DOMAIN_ID=0 in the user executables to make sure it runs on domain id 0.
For device-to-device communication, the DDS Router Client running on each device edge exchanges data via DDS Router Server running in cloud.
For cloud-to-cloud communication, since they are present in the same network, FastDDS Discovery Server is used to discover and establish the communication between two cloud deployments.
For cloud-to-device communication, the cloud has a peer-to-peer communication with the router using the FastDDS Discovery Server. The DDS Router then establishes communication with the device on the same or different network using the DDS Router Client.
By default, all topics/services/actions are whitelisted in a package component.
By default, ros2 nodes use shared memory to communicate with other nodes on the same system. So a config is mounted and the environment variable FASTRTPS_DEFAULT_PROFILES_FILE is set on user containers (cloud/device) to make sure it runs with UDP protocol.
- Currently we are not backing up the FastDDS discovery server communication state data. Suppose the discovery server is restarted, then cloud-to-cloud or cloud-to-device communication can’t be re-established. But device-to-device communication gets established eventually.
- Unlike ROS1, ROS2 Routed Network Server runs only on the cloud.
- It is recommended to use a single routed network for communication. But if a user deploys two or more routed networks with the same server id and uses all/few of them as a dependency in the user package, then any one of the routed networks will be used for cloud side communication.
- If a user uses both ROS2 routed and native network in a deployment, then the routed network overrides the native network’s environment variable
ROS_DISCOVERY_SERVERfor cloud side communication.
Multi-Robot Communication
To read the scenarios of multi-robot communication, click here.
Avoid complex hardcoded logic in launchfiles that lives with the source code or binary and automatically add/remove prefixes to ROS interfaces(topics/services/actions). Additionally, it is more flexible/dynamic to assign and use deploy-time identities than hard-coded robot names.
The process of assigning an identity to a robot and the mechanisms to consume/discover identities of all alive robots is described in the ROS environment aliases topic.
The mechanisms and features offered by the platform to deal with automatic prefix addition and removal is described in the scoping and targeting topics.
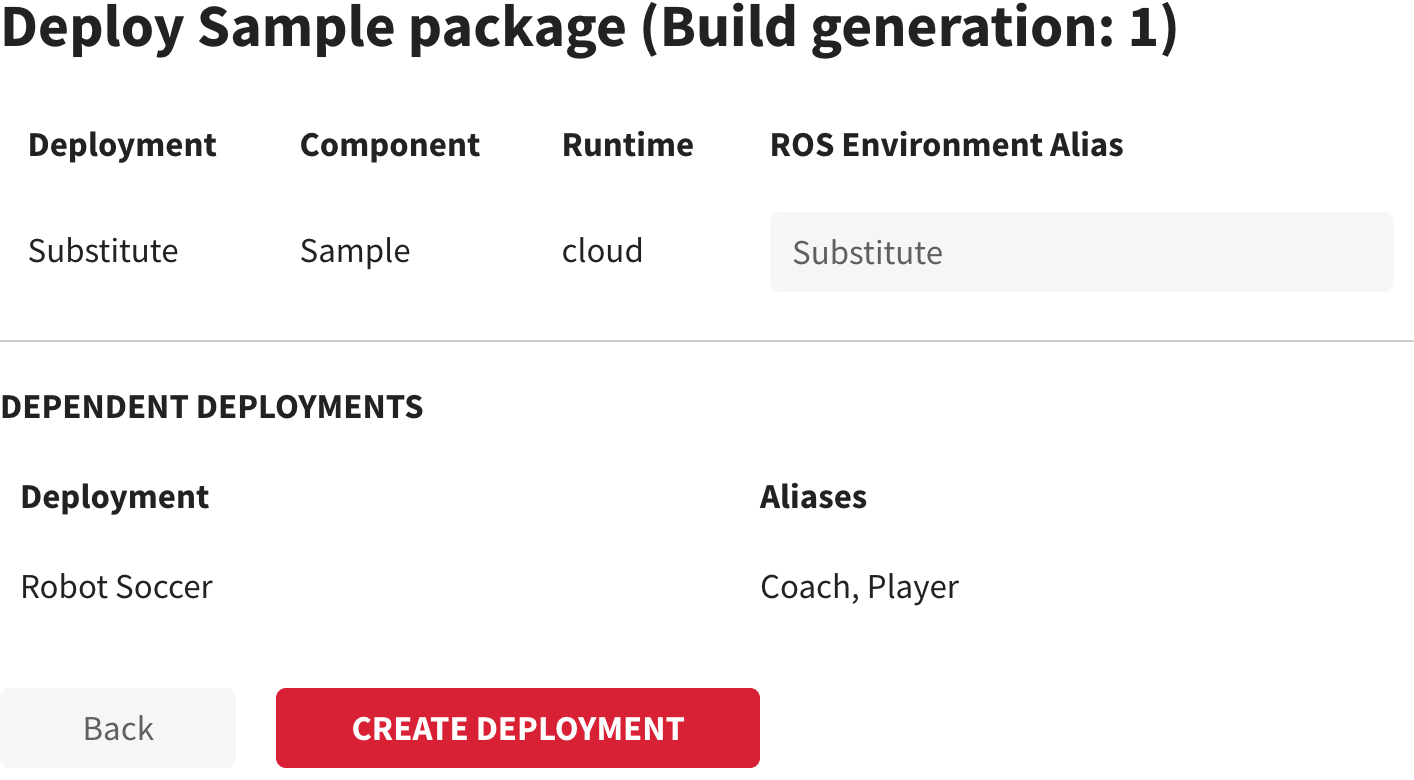
ROS Environment Aliases: runtime identity assignment
When deploying a component to a robot in a multi-robot scenario, the platform expects the user to input a unique alias per component , thereby, assigning a stable identity to that deployment for the period of its lifetime.
This alias defined at deploy-time uniquely identifies the robot in the scope of an ensemble of connected peers.
All components in the same package (each potentially deployed in a physically different device/location) or linked dependent deployments are considered a part of an ensemble.
The platform detects duplicates aliases explicitly for the case of components and deployment and its immediate parent.
This alias is available to Deployment Executables (both cloud and device) through RIO_ROS_ENV_ALIAS environment variable.
In the case of siblings (two deployments depending on the same parent), the component with a duplicate alias is considered a conflict and may enter an error state. The user must be careful and ensure the uniqueness of identities present in this case.
Discovering peers in an ensemble
rapyuta.io automatically exposes a latched ROS topic /rapyuta_io_peers of type std_msgs/String, which contains the list of all connected peers aliases, the first entity is always the alias of the local bridge.
For example, My_alias,peer_1,peer_2
The end-user can potentially use this in their ROS applications for discovering connected robots.
There may be more than one bridge locally depending on how you deployed the packages and components so you may receive multiple messages. In each case, the first element is always the alias of the bridge that published this message.
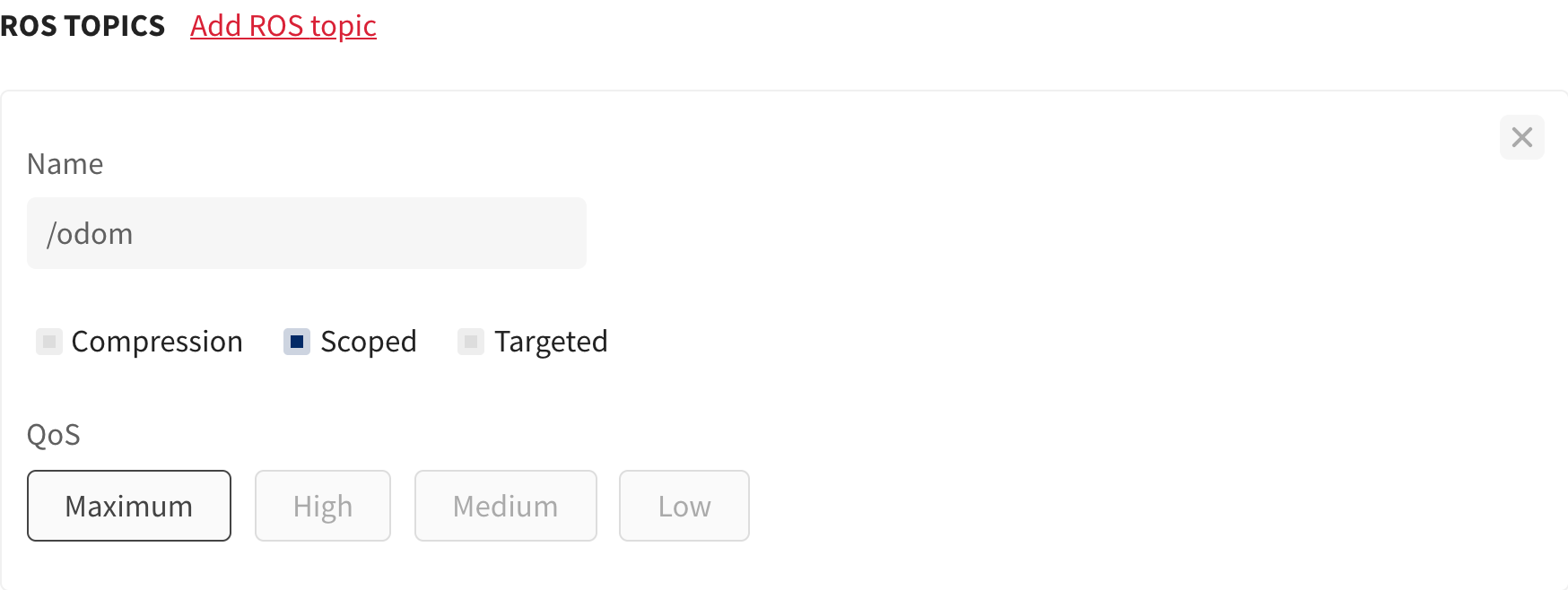
Scoping: auto prefix or namespace by self identity
In this configuration, a user may declare a topic/service/action as scoped by selecting the Scoped option.
This indicates that when a component is deployed its local ROS interfaces (topic/service/action) get automatically prefixed/namespaced bits own dynamic identity (its own ROS environment alias) as seen by all other robots/peers in the ensemble in their respective ROS graph.
For example, suppose robotA publishes /odom topic in its local ROS environment. While routing /odom to either of the robot peers (for instance a controller) the topic is prefixed with that specific robot’s name, in this case, /robotA/odom.
You can express scoped as: A scoped topic is a mapping from a /topic to /robot-peer-name/topic.
/odom ——-> /robotP/odom

If in the ROS message logs you experience the error: incoming connection failed: unable to receive data from sender, check sender’s logs for details, please ignore it. The error message is generated by ROS internally as a side effect of the sniffing done by the cloud bridge to determine metadata related to ROS message type for the service. It has no other effects on your code and/or the code’s functionality, and you can safely ignore it.
Targeting: auto prefix or namespace unwrapping for peers
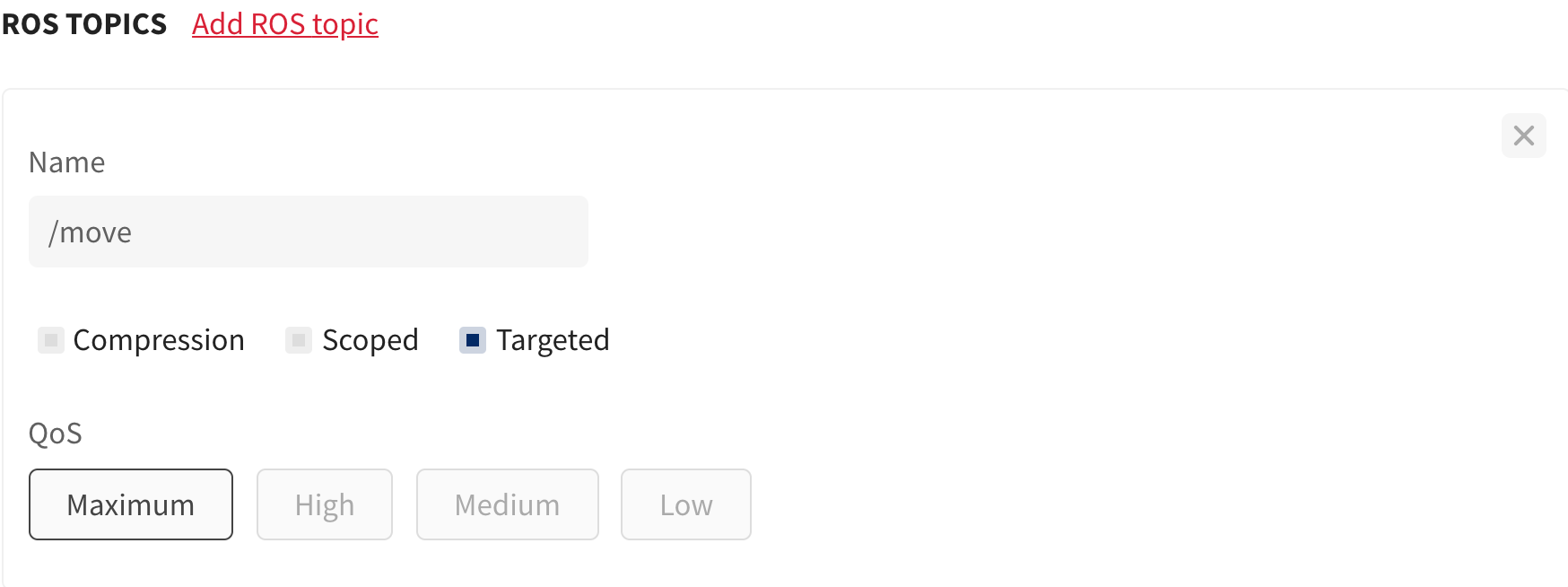
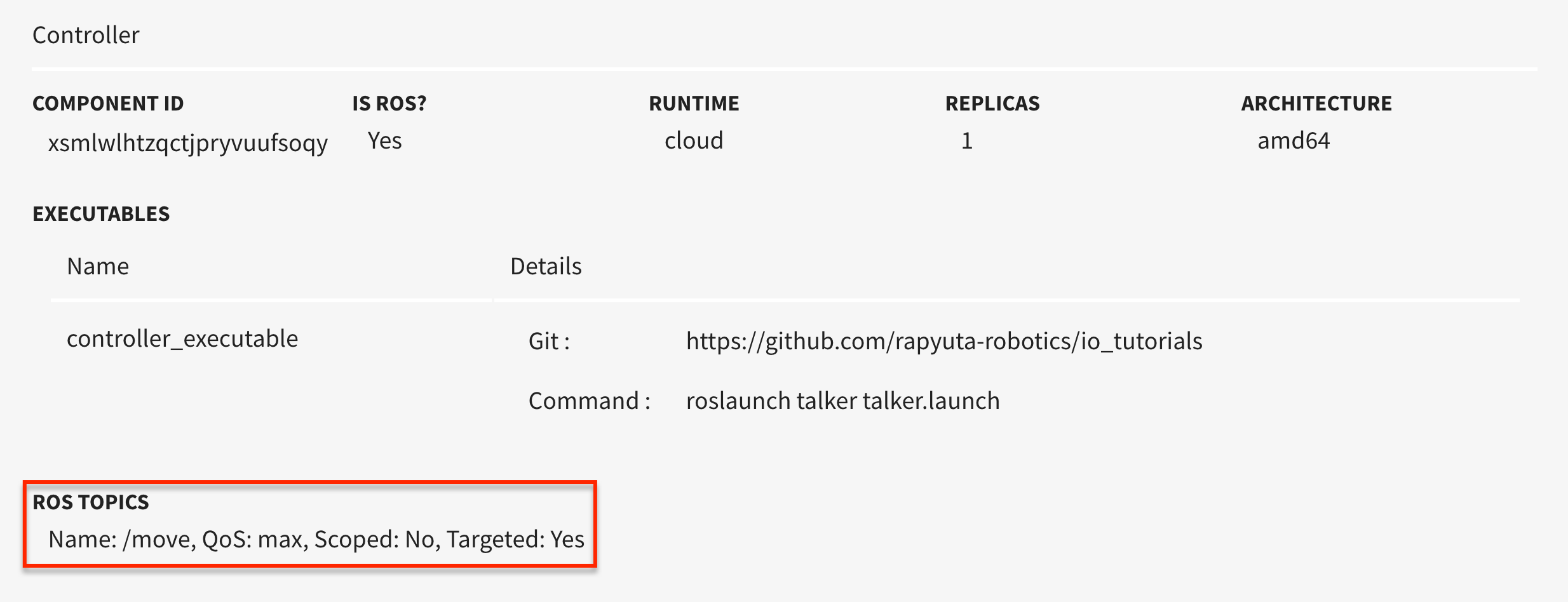
In this configuration, a user may declare a topic/service/action as targeted by selecting the Targeted option.
This indicates that when a component is deployed its local ROS interfaces (topic/service/action) containing a prefix/namespace corresponding to another individual peer’s dynamic identity (peers ROS environment alias) gets routed to the corresponding peer and automatically unwraps the prefix/namespace in its ROS graph.
For example, suppose robots in a particular scenario subscribe to the topic /cmd_vel to move and a central controller needs to ask a specific robot, say robotA, to move, then it needs to be able to target only robotA and send messages to its /cmd_vel subscription.
The controller in the above scenario publishes /robotA/cmd_vel topic. While routing /robotA/cmd_vel the bridge strips the prefix robotA and publish the messages on the topic /cmd_vel in robotA’s local ROS environment.
You can express targeted as: A targeted topic is a mapping from /robot-alias/topic to /topic.
/robotP/cmd_vel ———–> /cmd_vel
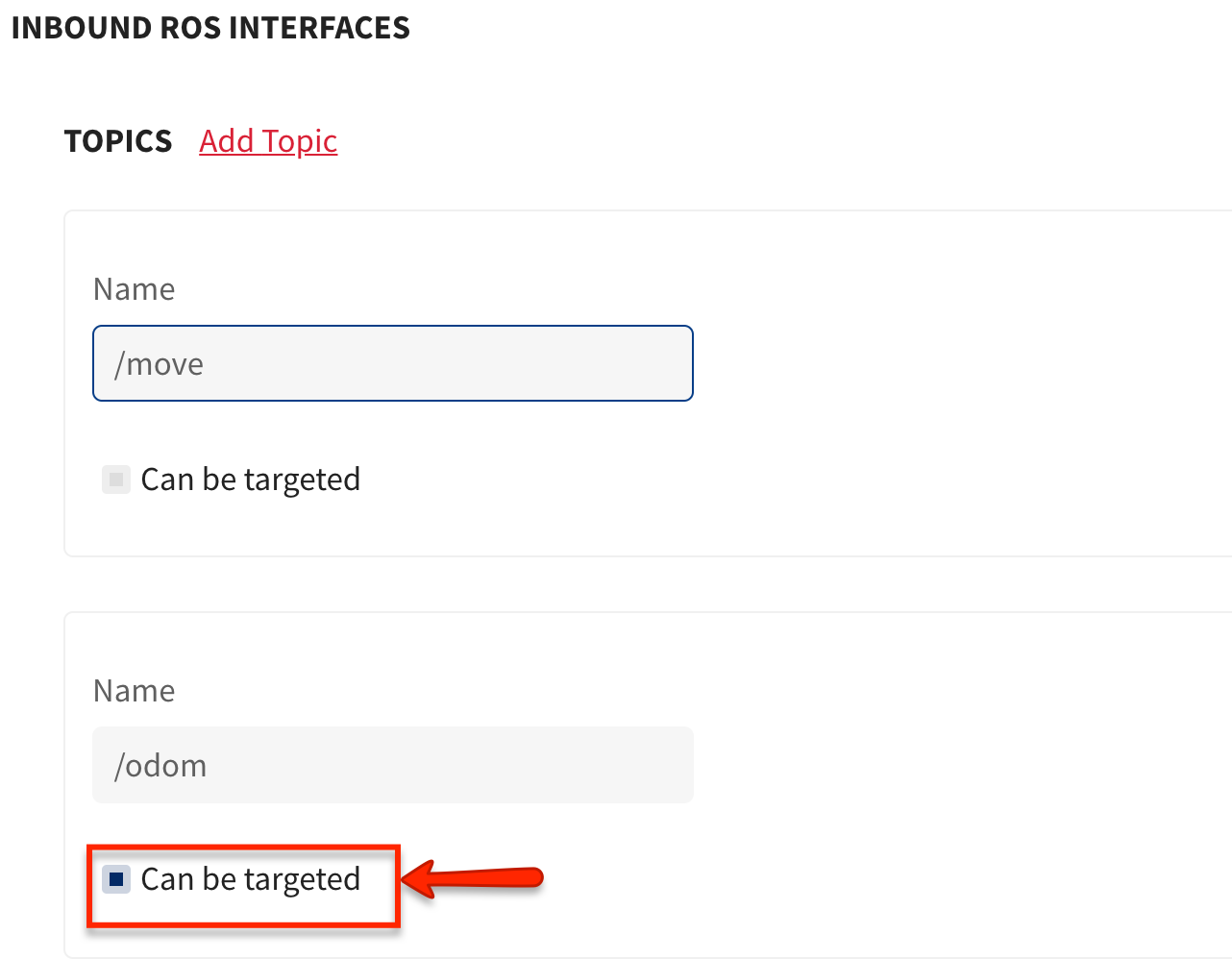
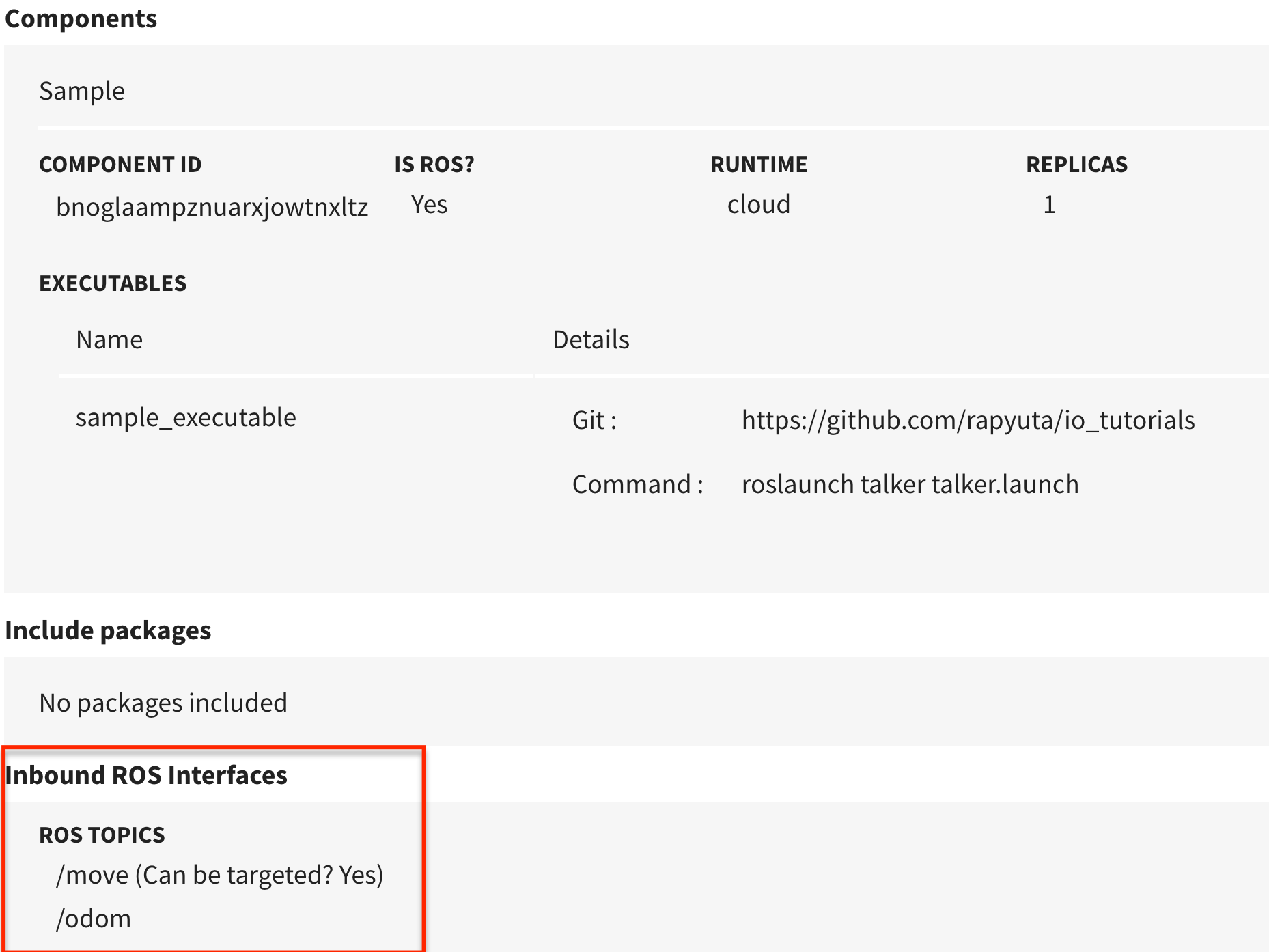
Targeting and Inbound ROS Interfaces
When a package allows for inbound ROS interfaces, you must provide hints to leverage the automatic targeting feature. The platform introspects the package to determine if it must enforce the unique identity constraints required for multi-robot communication.
As the platform follows a provider only semantic, determining this is straightforward for scoped as it is based on the identity of the deployment itself. It gets complicated for targeting as this depends on the identity of other peers. When a package is the first to be deployed (or root in any particular subtree of dependants) it becomes necessary to provide a hint to indicate that the interfaces will participate in communication topologies that require the presence of a stable unique identity.
To provide this hint while creating the package, in the Additional Information section, when one adds inbound ROS topics/services/actions one can select the can be targeted. This metadata is used by the platform to bridge communications and enforce alias constraints.